7.4 KiB
Free vibrations
Definition
This is a mass-spring system with friction: (imagine the \beta was b instead)
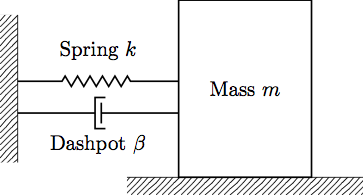 This mass-spring system with friction can be modelled by the following differential equation:
This mass-spring system with friction can be modelled by the following differential equation:
my''+by'+ky=F_{ext}(t)Where:
\begin{matrix}F_{ext}(t) & \text{any external forces applied }(N) \\m & \text{mass } (kg) \\b & \text{damping constant } \left( \frac{Ns}{m} \right) \\k & \text{spring constant } \left( \frac{N}{m} \right)\end{matrix}Free vibrations are when there are no external forces applied upon an oscillatory system. ie:
F_{ext}(t)=0Free vibrations is really another word for #second_order_homogenous But it puts emphasis that we are modelling a friction-mass-spring system and that we can describe the solution—the position of the mass y(t)—in terms of frequency, phase shift, and amplitude: \omega,\ \phi,\ A. It's more of a case study on real world implications than anything else.
System derivation
Let's start solving the DE!
mr^2+br+k=0 is the characteristic polynomial.
we can solve this polynomial equation using the quadratic formula:
r_{1,2}=\frac{-b\pm\sqrt{ b^2-4mk }}{2m}Our solution y_{h} will depend on what the value inside the \sqrt{\quad} is.
This nested value, b^2-4mk is called the discriminant.
We have three cases:
over damped case, b^2-4mk>0:
\begin{align}r_{1}&\ne r_{2}\quad (\text{non-repeated roots})\\y_{h}(t)&=c_{1}e^{r_{1}t}+c_{2}e^{r_{2}t}\xrightarrow[\text{as }t\to \infty]{}0 \\r_{1,2}&=-\frac{b}{2m}\pm \frac{\sqrt{ b^2-4mk }}{2m}<0\end{align}critically damped case, $b^2-4mk=0$:
\begin{align}r_{1}&=r_{2}\quad \text{(repeated roots)} \\y_{h}(t)&= c_{1}e^{rt}+c_{2}te^{rt}\xrightarrow[\text{as }t\to \infty]{}0 \\r_{1,2}&= -\frac{b}{2m}<0\end{align}under damped case, $b^2-4mk<0$: $$\begin{align}r_{1,2}&=\alpha\pm i\beta \quad \text{(imaginary roots)} \\ y_{h}(t)&=e^{\alpha t}(c_{1}\cos (\beta t)+c_{2}\sin(\beta t))\xrightarrow[\text{as }t\to \infty]{}0 \\ r_{1,2}&=-\frac{b}{2m}\pm i\frac{\sqrt{ 4mk-b^2 }}{2m}\end{align}$$
#end of lec 11 #start of lec 12 (oct 2 2023)
Recall the solution for the under damped case, y_{h}(t)=e^{\alpha t}(c_{1}\cos (\beta t)+c_{2}\sin(\beta t))
It's hard to visualize a sum of two trig functions. It would be nice if we could define y_{h} in terms of phase shift, amplitude, and frequency.
The frequency part is easy: let \omega=\beta (called the angular frequency) Notice that means the frequency of the system depends on m, b, and k !
Now for phase:
Which trig identity could help us here? This one looks handy:
\sin(\alpha+\beta)=\sin \alpha\cos \beta+\cos \alpha \sin \beta
Ah but c_1 c_2 isn't in terms of \sin or \cos, so what we do?
Do a substitution! Convert cartesian into polar coordinates:
c_{1}=A\sin \phi
c_{2}=A\cos \phi
then:
Ae^{\alpha}(\sin \phi \cos \omega t+\cos \phi \sin \omega t)
=Ae^{\alpha}\sin(\omega t+\phi) Much neater looking!
\phi is the phase shift in radians.
\frac{\omega}{2\pi} is the natural frequency (oscillations/second).
Taking the inverse, \frac{2\pi}{\omega} is the period (seconds/oscillation).
This behavior is all a result of classical mechanics, but rather beautifully, electronic circuits composed of resistors, inductors, and capacitors can also be described by this equation. You'll see it in biology too.
"... Nature is beautiful and harmonic." -Prof (not an exact quotation, I didn't catch what he precisely said.)
btw we know A=\sqrt{ c_{1}^2+c_{2}^2 }
and \tan \phi=\frac{c_{1}}{c_{2}}
so we can compute A and \phi from c_1 and c_2.
Examples
#ex #second_order_homogenous #IVP
Solve the following IVP's when b=0, b=6, b=10, and b=12
(This is more of a study than an example problem. We have already solved equations like this so treat it as an exploration. Note the important takeaways at the end of each case)
y''+by'+25y=0 \qquad y(0)=1\quad y'(0)=01.) b=0 -> no friction in the system (undamped)
b^2-4mk<0 (under damped)
\alpha=-\frac{b}{2m}=0
\beta=\frac{\sqrt{ 4mk-b^2 }}{2m}=\frac{\sqrt{ 4(1)(25)-0^2 }}{2(1)}=5
y(t)=e^{0t}(c_{1}\cos 5t+c_{2}\sin 5t)=c_{1}\cos 5t+c_{2}\sin 5t
y(0)=c_1=1
y'(0)=-5\sin 5t+5c_{2}\cos 5t
y'(0)=0=c_{2}
y(t)=\cos(5t)=\sin\left( 5t+\frac{\pi}{2} \right) (by trig identity)
\phi=\frac{\pi}{2} \qquad \omega=5 \qquad A=1Important take away from undamped case: amplitude is constant 1, oscillates forever.
2.) b=6
compute b^2-4mk=36-4*25=-64<0
Still under damped situation.
r_{1,2}=-\frac{b}{2m}\pm \frac{\sqrt{ 64 }}{2m}i=-3\pm4i
y(t)=e^{-3t}(c_{1}\cos4t+c_{2}\sin4t)
y(0)=1=c_{1}
y'(t)=e^{-3t}(-4c_{1}\sin 4t+4c_{2}\cos 4t)+ -{3}e^{-3t}(c_{1}\cos 4t+c_{2}\sin 4t)
y'(0)=0=4c_{2}-3c_{1}\Rightarrow c_{2}=\frac{3}{4}
A=\sqrt{ c_{1}^2+c_{2}^2 }=\frac{5}{4}
\tan \phi=\frac{c_{1}}{c_{2}}=\frac{4}{3}
\phi \approx 0.9273\dots
y(t)=\frac{5}{4}e^{-3t}\sin(4t+\phi)Important take away: We computed \phi and A in this example. We found a way to know the envelope of the amplitude of the oscillating system and it's phase shift.
"I know engineers love calculators, I know mathematicians hate calculators, and that's probably the only difference between mathematicians and engineers." -Prof (referring to calculating arctan(4/3) on an exam)
3.) b=10
r_{1,2}=-\frac{10}{2}\pm \frac{\sqrt{ 10^2-4*25 }}{2}=-5 (repeated root, critically damped)
y(t)=(c_{1}+c_{2}t)e^{-5t}
y(0)=1=c_{1}
y'(t)=-5c_{1}e^{-5t}+c_{2}e^{-5t}-5c_{2}te^{-5t}
y'(0)=-5c_{1}+c_{2}=0
c_{2}=5
y(t)=(1+5t)e^{-5t}\rightarrow0_{as\ t\to\infty}
Important take away: notice that y(t) here is always strictly positive (y(t)>0). It doesn't oscillate at all. (Also if you recall from PHYS130, critically damped is the optimal amount of damping to get the mass to settle to the equilibrium position as fast as possible.)
4.) b=12
r_{1,2}=-\frac{12}{2}\pm \frac{\sqrt{ 144-100 }}{2}-6\pm \sqrt{ 11 }
y(t)=c_{1}e^{(-6+ \sqrt{ 11 })t}+c_{2}e^{(-6-\sqrt{11 })t}
y(0)=c_{1}+c_{2}=1
y'(0)=(-6+\sqrt{ 11 })c_{1}+(-6-\sqrt{ 11 })c_{2}=0
solving the linear system of equations gives:
c_{1}=\frac{11+6\sqrt{ 11 }}{22}
c_{2}=\frac{{11-6\sqrt{ 11 }}}{22}
Important takeaway: this is an over damped case.
Final big takeaway:
Lets look at the graphs, we are assuming t>0 to keep things realistic. Notice how the black line (b=10) decays faster than the b=12 and the b=6. Also notice how there can be a local max/min in an over damped system. It's possible to have local max/min in a critically damped system as well. This is a cause of giving the mass some initial speed when you released it. An under damped system has infinitely many local max/mins. (psst, A possible question you may come across is to ask what t an oscillatory system reaches it's max/min value, and what value it attains). An over damped and critically damped system will never cross the x axis unless you give it sufficient speed when you release it and that you're "throwing it" in the direction of the equilibrium position. Finally, notice how the under damped system will cross the x axis infinitely many times, and has a constant period, and can be viewed as a sin wave with an exponentially decaying envelope and a bit of phase.
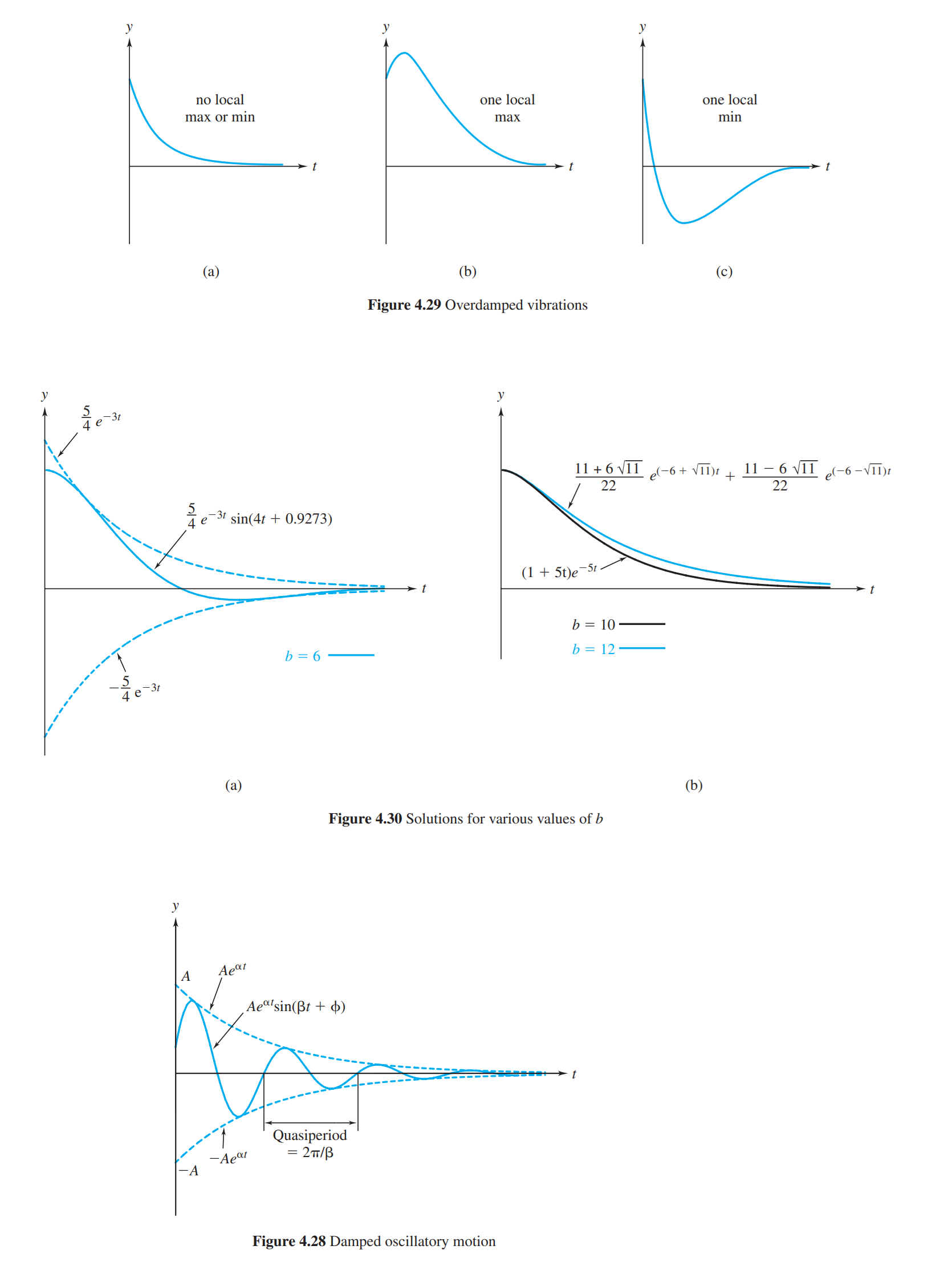 This image is from the course textbook, on page 215: Fundamentals of Differential Equations, R. Kent Nagle, Edward B. Saff and Arthur D. Snider, 9th Edition.
Hey, we are all done! See, free vibrations is more of a case study rather than new content.
#end of lec 12
This image is from the course textbook, on page 215: Fundamentals of Differential Equations, R. Kent Nagle, Edward B. Saff and Arthur D. Snider, 9th Edition.
Hey, we are all done! See, free vibrations is more of a case study rather than new content.
#end of lec 12